マサチューセッツ工科大学(MIT)の研究チームは、濃霧を通して障害物の存在を認識できる技術を開発した。人間の目だと見通せないほど濃い霧のなかでも障害物の形と距離が計測可能で、自動運転車のLIDARに適用できそうだ。

濃霧を見通して障害物の形と距離を計測(出典:MIT/YouTube)
自動運転車が周囲の状況を認識するシステムでは、可視光に反応するカメラがよく使われる。これは、標識や路面のサイン、車線のペイントなどを高い解像度で識別するのに適しているからだという。しかし、濃い霧を通すと光が散乱されてしまい、人間と同様に障害物の発見が難しくなる。

濃い霧のなかでは障害物の発見が難しい(出典:MIT/YouTube)
この問題を解決するために、研究チームはレーザー光線を発して周囲を把握するTOF(Time-Of-Flight)カメラを採用した。これは、照射したレーザー光パルスが物体に反射して戻ってくるまでの時間を計ることで物体までの距離を決定する一種のセンサだ。しかし、濃霧の場合は水滴の影響で時間がばらつき、正確な計測ができない。
霧の濃さを変えるなどして実験した研究チームは、レーザー光の戻る時間パターンが霧の濃度と関係なくガンマ分布に従うことを確認。そこで、1024ピクセルある光センサの各ピクセルでガンマ分布の性質決定に必要な2つのパラメータをリアルタイムに計算するシステムを開発し、濃霧のなかでも正確に計測できるTOFカメラを実現させた。
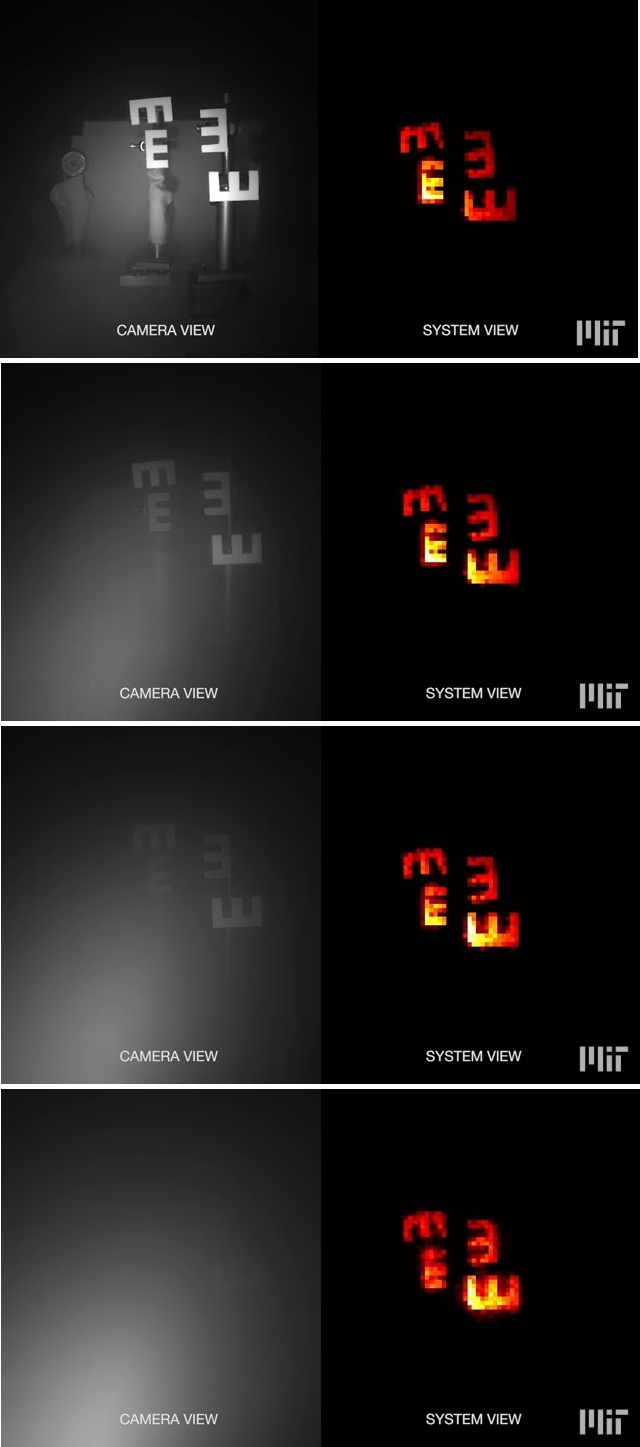
開発したシステム(右)は霧が濃くなっても障害物が見える(出典:MIT/YouTube)
実験室で霧を再現し、人間だと36cm離れると見えなくなる状況下でも、このシステムは57cm先にある物体の形を描き出すことに成功した。これだけ見通すことが可能であれば、実際の環境で人間の能力を上回る視界の確保が可能になるという。
CNET Japanで全文を見る
0 件のコメント:
コメントを投稿